
Next-Generation Battlefield Navigation for GPS-Denied Environments: Introducing the N200M Module
UNIBIRD
3/24/20262 min read
As unmanned systems increasingly operate in complex and contested environments, reliable navigation without GPS has become a mission-critical requirement. From dense urban environments to electronically contested zones, traditional satellite-based navigation systems are increasingly vulnerable to disruption.
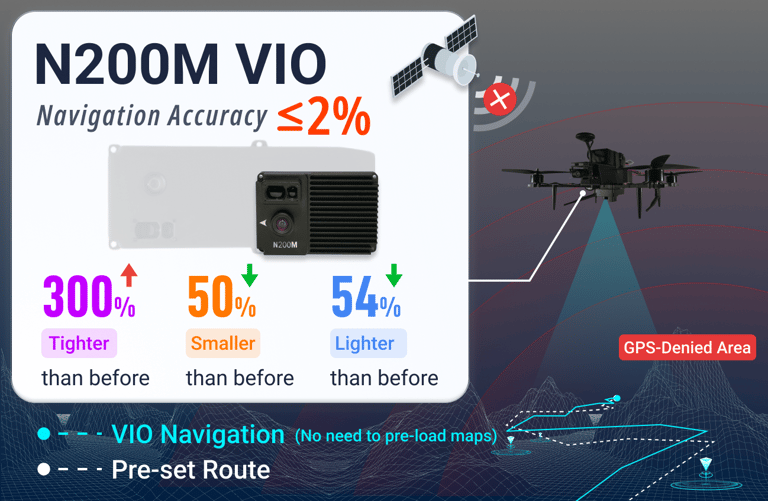
To address these challenges, UNIBIRD introduces the N200M Visual-Inertial Odometry (VIO) Module, a next-generation navigation solution designed to deliver precise, real-time positioning in the most demanding conditions.
A New Benchmark in Compact Navigation Performance
The N200M represents a significant leap forward in both hardware optimization and algorithmic efficiency. Designed for seamless integration into a wide range of UAV platforms, it delivers measurable improvements across key performance indicators:
50% smaller form factor
With dimensions reduced to 92 × 62 × 37.3 mm, the N200M enhances platform compatibility and integration flexibility.54% weight reduction
Weighing just 128 grams, it minimizes payload burden and contributes to extended flight endurance.300% improvement in navigation accuracy
The system maintains a positioning error of ≤2%, even in dynamic and degraded environments.
Despite these advancements, the module retains a highly competitive price point, making advanced navigation technology more accessible than ever.
Designed for GPS-Denied and Contested Environments
Modern operational environments frequently involve GPS interference, jamming, or spoofing. In fact, a significant proportion of UAV losses can be attributed to navigation failure under such conditions.
The N200M addresses this challenge through a robust multi-sensor fusion architecture:
Visual + IMU + Laser integration
By combining camera-based perception, inertial measurements, and laser ranging data, the system ensures continuous situational awareness.Tightly coupled SLAM framework
The module leverages advanced Simultaneous Localization and Mapping (SLAM) algorithms to enable real-time positioning and mapping without prior environmental data.Adaptive feature tracking
Even in low-texture or high-speed scenarios (up to 15–20 m/s), the system maintains stable tracking performance.
This enables fully autonomous navigation in unknown environments—without reliance on preloaded maps or external infrastructure.
High-Speed, High-Altitude Operational Capability
The N200M is engineered to meet the demands of modern UAV missions, offering strong performance across a wide operational envelope:
Maximum operating altitude: 200 meters
Significantly higher than many competing solutions.Maximum flight speed: 15 m/s
Ensures stability and accuracy even during rapid maneuvers.Output frequency: 30 Hz with ultra-low latency (28 ms)
Provides real-time navigation data for responsive control systems.
These capabilities make the N200M suitable for applications ranging from tactical reconnaissance to industrial inspection and autonomous logistics.
Cost-Effective Access to Advanced Navigation
Traditionally, high-precision navigation systems have been prohibitively expensive. The N200M changes this paradigm by offering:
High-performance navigation at a fraction of the cost
Scalable deployment for both commercial and defense applications
A balance between affordability and cutting-edge capability
This makes advanced autonomy accessible to a broader range of developers, integrators, and operators.
Conclusion
As the demand for autonomous systems continues to grow, the limitations of GPS-based navigation are becoming increasingly evident. The N200M VIO Module provides a reliable, scalable alternative—empowering UAVs to navigate independently, accurately, and efficiently in GPS-Denied environment.
By combining advanced sensor fusion, compact design, and real-world performance, the N200M is not just an upgrade—it is a fundamental step forward in autonomous navigation technology.